
この記事は2020年10月1日に掲載された情報となります。
ホクレン 訓子府実証農場 農産技術課 係長 佐久間 芳則
POINT
●ガイダンスと自動操舵で、「作業の効率化による時間短縮」「圃場の効率的利用による増収」「作業時の疲労軽減」を確認
急速に普及が進むGNSS(衛星測位システム)ガイダンスシステムと自動操舵補助装置(以下、ガイダンス・自動操舵)。主なメリットは、トラクター作業での掛け合わせ幅や切り返し回数の削減による時間短縮、安定した直進性による高精度作業、直進性確保による疲労軽減効果などです。しかし、これらのメリットは具体的な数値で表すとどの程度でしょうか? ホクレン訓子府実証農場では、効果を数値化するために試験を行いました。
試験は、馬鈴しょ栽培において、ガイダンス・自動操舵を使用した場合(以下、使用区)と不使用の場合(以下、不使用区)で実施。調査対象は、同一オペレーターによる耕起、播種、早期培土(1回)、収穫の各工程とし、作業時間や直進性の及ぼす効果、疲労程度を各1haの圃場で比較しました。
作業の効率化により時間短縮
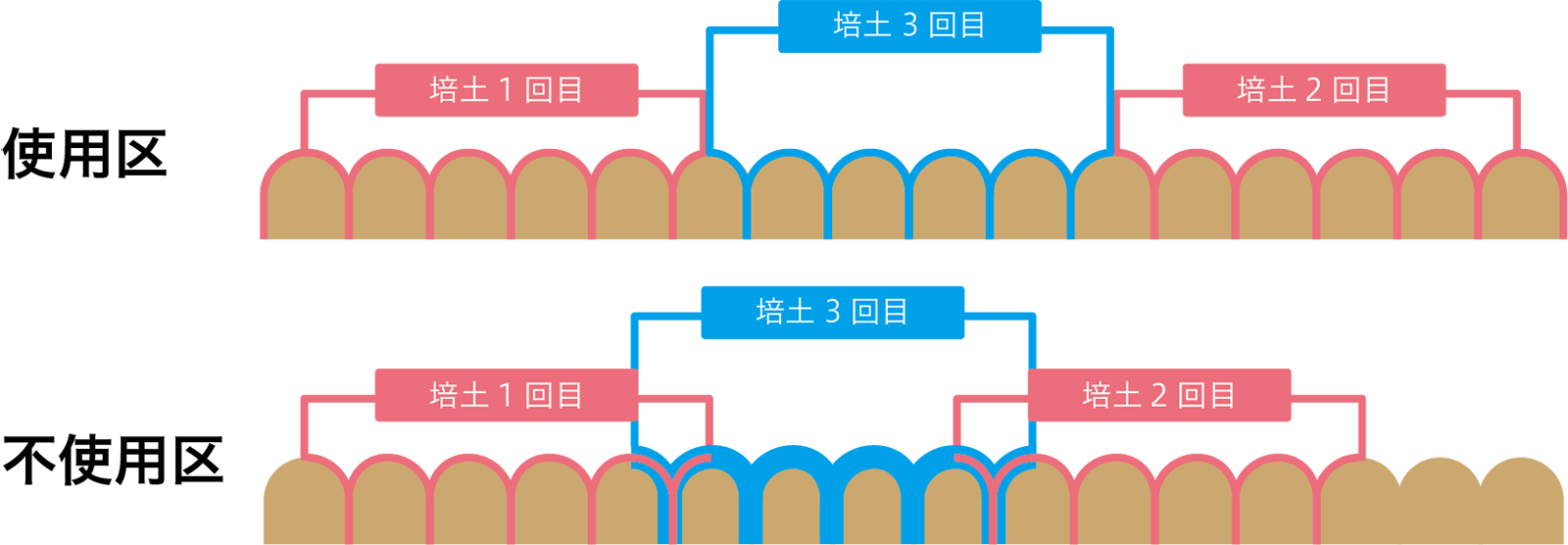
作業速度に着目すると、耕起及び播種工程では、圃場の状況や作業に適した速度の制約があり、両試験区に大きな差はありませんでした。一方、培土及び収穫工程では、畝の直線性や畝間の精度が確保されたことから、使用区の作業速度がアップ(表1)。また、使用区の耕起回数や培土回数も削減されました(表2)。耕起回数の削減は、耕起時の掛け合わせ幅の減少が理由です。培土は、従来の作業機両端の培土畝を重複させるやり方から、重複させない方法へ変更できたことが効率化の要因となりました(図1)。更に、4工程の作業時間を合計すると、使用区は約23%の削減となりました(表2)。

※1haの圃場全体の作業時間から算出(旋回及び切り返し時間は除く)。

※不使用区の培土は両端の畝を重複させて実施。
※全作業時間は、耕起・播種・培土・収穫の合計時間。
直進性や畝間精度の向上により増収の可能性あり
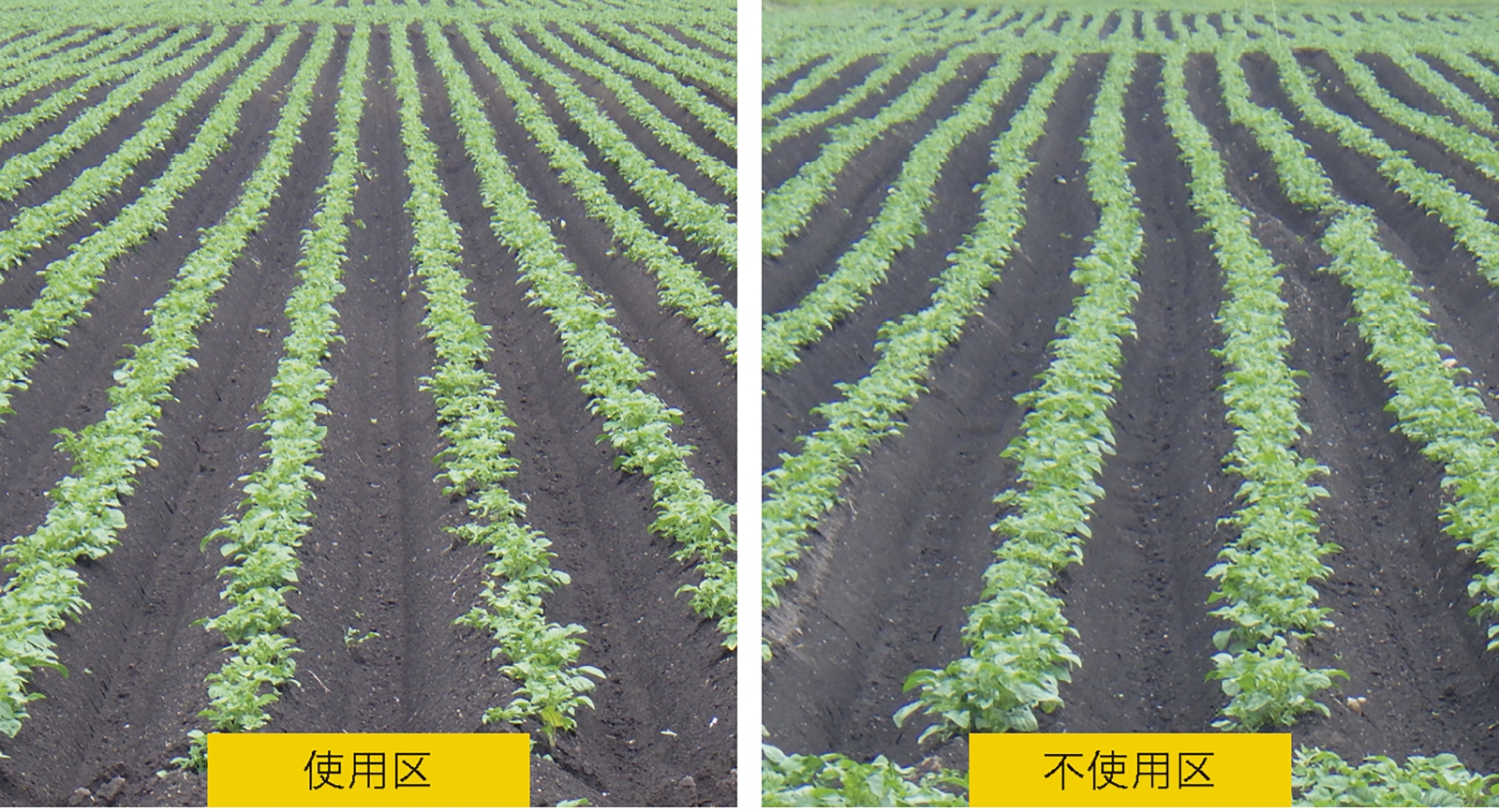
播種は、2畝播きカッティングプランターで、幅約75mの圃場に畝間72㎝で実施。この圃場では計算上は最大104本の畝を確保できますが、不使用区では一部蛇行するなどの影響で100本しか確保できませんでした。一方、使用区ではきちんと104本を確保(写真1)。この差から、約4%増収の可能性を確認できました。また、不使用区では、収穫時に一部、馬鈴しょの掘り残しが発生 (写真2)。真っすぐな畝を作ることで、掘り残しによる減収や野良いもの発生も軽減できそうです。

収穫時の後方確認に注力できる
オフセットハーベスターによる100m収穫時のオペレーターの目線を比較しました。不使用区では走行位置がずれないように常に前方を見る必要があり、後方作業を確認する時間の割合は28・4%でしたが、使用区ではほとんどの時間を後方確認に割くことが可能に。また、不使用区は20回以上も後ろを振り返る必要があったのに対し、使用区は主に後方のみを確認。その結果、振り返り回数は5.3回でした(表3・写真3)。オペレーターは「使用区では掘り取り口の調整に、より集中でき、疲労も少ない」と評価しました。

※オペレーターの頭部にカメラを装着し、視認方向を調査。
※オフセットハーベスターによる収穫。

ガイダンス・自動操舵の使用による視認検査の様子は下記のアドレス先の動画でご覧いただけます。https://www.youtube.com/watch?v=ORJXS1k7G4k
 TOP
TOP
 新着記事
新着記事 特集記事
特集記事